HomeProductsDynaGuide Robot Adaptive Control/Guidance System
DynaGuide: Robot Adaptive Control & Guidance System
The DynaGuide™ software has come about quite naturally, in response to the ever-increasing need to integrate robots with various measurement sensors. It provides a comprehensive solution for correction of robot programs based on real-time measurement data. The DynaGuide software addresses a seemingly trivial problem – move the robot by the distance measured – by offering a single interface combining several underlying technologies, resulting in a solution combining ease of use and high accuracy.
Many of the technologies and capabilities included in the DynaGuide software stem from Dynalog’s standard and well-established products, such as the DynaCal™, the AutoCal™, and the DynaFlex™ products – backed with years of exploitation in various production installations.
Compatibility/Interface with various measurements systems: from 1D to 6DOF; small-range robot-mounted or large-range floor-mounted; independent of the measurement principle (vision, laser, contact, non-contact, etc.).
Seamless robot communication: extensive library of robot controllers and languages.
PLC communication: to receive commands, and to send the messages and warnings.
Robot-cell calibration: starting with an accurate robot greatly helps the guidance process through (1) improved cycle time (smaller correction factor), (2) better obstacle avoidance, (3) inherently higher guidance accuracy (‘linearization’ of the correction factor).
Extensive math toolkit: 1D to 6DOF offset calculations, coordinate frame transformations, statistical tools, etc.
Any Type of Guidance Application or Adaptive Control Application
The DynaGuide™ software is easily configurable to handle virtually any possible combination of robot and measurement sensor setup.
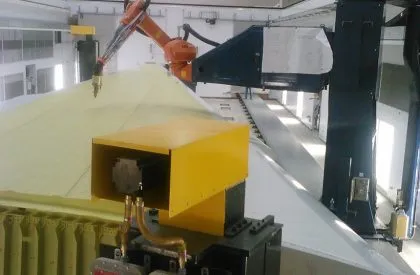
A typical application includes the use of a handful of fixed sensors (3D or otherwise) measuring reference features on a production part, in order to correct the robot program accordingly for any part-to-part variation – from a simple shift to a full 6DOF transformation. A variation on that same theme is to mount one or more sensors at the end of the robot, in some cases even combining both fixed and robot-mounted sensors (“hybrid” solution). Dynalog has participated in many such installations over the years, dealing with 3D vision systems (laser/camera), with touch-probes, with ultrasound devices, etc.
In an adaptive control application, the measurement process is essentially reversed: a fixed measurement system providing accurate 3D or 6DOF within a large area is used to measure the robot’s end (TCP). By comparing the acquired measurement data with the desired robot poses/path (from CAD), the DynaGuide software then corrects the robot program transparently one point/segment at a time (right before or even right at the desired robot location). This technology offers the ability to achieve high accuracy, even as unpredictable error sources (such as external forces, backlash, environmental drifts, etc.) might crop up.
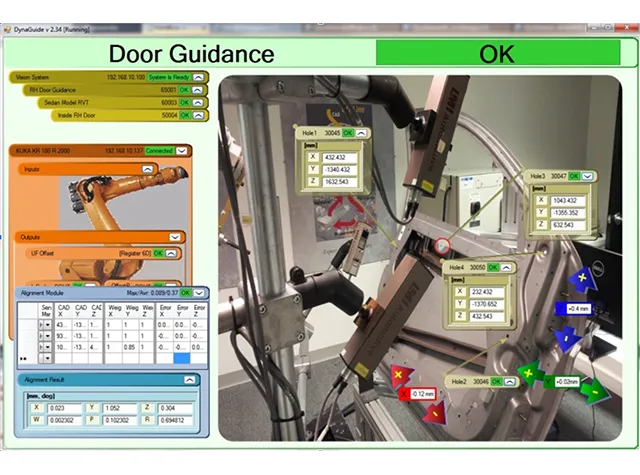
To handle these different types of applications and configurations, the DynaGuide™ software has been designed to be intuitive to setup, based on a menu-driven interface with preexisting ‘configuration templates’. It allows the user to create different algorithms for robot program correction, or to draw from Dynalog’s extensive math toolbox. This results in robot guidance with the highest possible accuracy, especially when combined with Dynalog’s various calibration tools.
The DynaGuide™ software also acts as a central hub within the robot-cell, communicating with all peripheral equipment, including of course the selected robot(s) and measurement sensor(s), but also the PLC and the database server. All that – measurement acquisition, correction calculation, communication, etc. – naturally has to take place at fractions of a second. As a robust production tool, the DynaGuide™ software also comes with all necessary error-handling and by-passing tools, remaining impervious to any peripheral equipment crash or malfunction.
One typical issue to deal with in various robotic applications is the variation from part to part of the location of the fixture holding the part the robot is operating on; another typical case is simply the variation of the pa...
Some robot applications require the highest possible accuracy – close to the robot's repeatability, i.e. typically < 0.1mm – which robot-cell calibration alone cannot achieve, especially in the case of external dynamic ...
Quick answers to questions you may have about our services. Can’t find what you’re looking for? Contact Us Now.
The CompuGauge system can perform all the ISO-9283 tests. In addition, it can also perform the ANSI/RIA R15.05-1/2 tests.
The DynaGuide product is utilized to identify the location of the part with respect to the robot and it updates the user frame of the robot automatically.
The DynaFlex and the AccuBeam systems are utilized to identify the variation in the robot due to ambient temperature variations and due to self-heating of the robot and then compensate them automatically. The DynaFlex system also provides robot Absolute Accuracy.
The roPOD system recovers the Tool Center Point after a crash or replacement. In addition, the roPOD can also recover the robot zero-position-mastering.
Accuracy = ±0.15 mm
Measurement Volume = up to 3 m x 6 m x 3 m
Yes, DynaCal system calibrates the zero-position-mastering in addition to other geometric and non-geometric parameters, i.e. DynaCal system calibrates all the Absolute Accuracy parameters of the robot-cell (robot+TCP+UserFrame+Auxilliary_axes).
We collect cookies to analyze our website traffic and performance; we never collect any personal data.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.
 The DynaGuide™ software has come about quite naturally, in response to the ever-increasing need to integrate robots with various measurement sensors. It provides a comprehensive solution for correction of robot programs based on real-time measurement data. The DynaGuide software addresses a seemingly trivial problem – move the robot by the distance measured – by offering a single interface combining several underlying technologies, resulting in a solution combining ease of use and high accuracy.
The DynaGuide™ software has come about quite naturally, in response to the ever-increasing need to integrate robots with various measurement sensors. It provides a comprehensive solution for correction of robot programs based on real-time measurement data. The DynaGuide software addresses a seemingly trivial problem – move the robot by the distance measured – by offering a single interface combining several underlying technologies, resulting in a solution combining ease of use and high accuracy. Any Type of Guidance Application or Adaptive Control Application
Any Type of Guidance Application or Adaptive Control Application