Targeted Robot Communication Solutions – Plant-Wide Data Server – Unlimited Robot Controller Memory – etc.
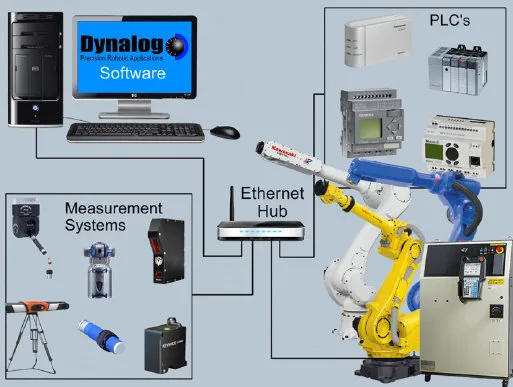
Most of Dynalog’s products require a solid communication line and reliable integration not only with the robot controller, but with other equipment as well, such as with numerous measurement devices, with different PLC’s, and with customers’ data servers. The need to ‘Filter’ robot programs with the DynaCal™ system, to automatically update TCP values with the AutoCal™/AccuBeam™ system, to compensate robot positions on-line with the DynaGuide™ system, etc. has led Dynalog to develop interfaces over the years with virtually every industrial robot controller around the globe.
Similarly, products such as the DynaCal™, the DynaFlex™ and the DynaGuide™ systems have led to the development of different integration protocols with multiple types of sensors, such sensors often being provided with their proprietary measurement software. Since the robot controller, together with one or the other of Dynalog’s products, often acts as the central hub for the robot station, communication with various brands of PLC’s has been developed as well, allowing the production line to react in one way or the other in response to some of the measurement findings coming from the roPOD™ system for example.
In fact, Dynalog’s extensive set of communication tools has been bundled together within a unique software module, referred to as DynaRobotCom™ (DRC), which has then been integrated and is provided as part of many of Dynalog’s standard products, such as the roPOD, the AccuBeam, the DynaFlex and the DynaGuide systems. This modular software approach and the ability to communicate with so many different robot peripherals has established Dynalog products as reliable plant floor tools, part of a complete robotic station along a production line, rather than mere stand-alone ‘islands’.
This also means that Dynalog can provide customers with higher levels of integration, if desired, geared towards the customer’s particular setup. A typical example relates to robot-cell ‘Cloning’, where a customer would want the ability to share robot programs between multiple ‘identical’ robot-cells at any time, so that any change of a program in any robot-cell will systematically and automatically appear in all other ‘identical’ cells as well. In such cases, Dynalog has integrated its DynaCal robot-cell ‘Cloning’ functions within the customer’s own software platform. Another example is the integration of the DynaCal ‘Filter’ within certain Simulation packages, so that any robot program created in the latter environment can be Filtered transparently on the same computer platform and within the same software, rather than requiring a separate step.
Yet another example relates to Dynalog’s solution for effectively expanding a robot controller’s standard memory. Indeed, some robot users need the ability to execute a high number of different robot programs, each one containing a lot of robot positions. This is becoming more prevalent of course with the avenue of Off-Line Programming (see “Off-Line Programming with No Touchup”). Unfortunately, the computer memory on some robot controllers is simply not large enough to hold all of these robot programs.
The solution developed by Dynalog to address this issue is referred to as “Drip-Feeding” of robot programs from a standard PC to the robot controller (virtually any make). All of the robot programs are stored on the PC, and are loaded onto the robot controller only when required, after deletion on the robot controller of previously executed programs to make room for the new ones. The robot programs permanently stored on the PC are generally generated through Simulation. Dynalog’s DRC software module is used to establish the necessary communication lines between the PC and the robot controller.
We collect cookies to analyze our website traffic and performance; we never collect any personal data.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.